Robotyczna maszyna polerująca – wysoce precyzyjne zautomatyzowane wykańczanie powierzchni





Szczegółowy diagram
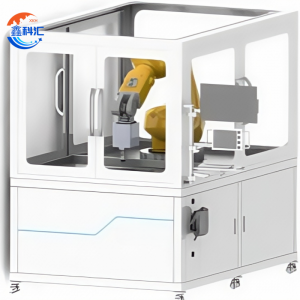

Przegląd robota polerującego
Robotic Polishing Machine to zaawansowany, w pełni zautomatyzowany system do obróbki powierzchni, zaprojektowany z myślą o spełnieniu najwyższych wymagań w zakresie produkcji precyzyjnej. Łączy on sześcioosiowe sterowanie robotyczne, technologię polerowania z sprzężeniem zwrotnym siły oraz konfigurację dwugłowicową, aby obsługiwać szeroką gamę materiałów i złożone geometrie z wyjątkową dokładnością i powtarzalnością.
Niezależnie od tego, czy chodzi o soczewki optyczne, części lotnicze, precyzyjne elementy inżynieryjne czy zastosowania w półprzewodnikach, maszyna ta gwarantuje stabilne, powtarzalne i wysokiej jakości wykończenie powierzchni — nawet z tolerancją na poziomie nanometrów.


Kompleksowa kompatybilność obrabianych przedmiotów z robotem polerującym
System wspiera przetwarzanie:
-
Powierzchnie płaskiedo szkła, ceramiki i płyt metalowych
-
Kształty cylindryczne i stożkowetakie jak rolki, wały i rury
-
Elementy sferyczne i asferycznedo systemów optycznych
-
Powierzchnie swobodne i pozaosioweze złożonymi krzywymi i przejściami
Jego wszechstronność sprawia, że nadaje się dozarówno produkcja masowa, jak i precyzyjna produkcja niestandardowa.
Główne cechy i zalety robota polerującego
1. Technologia podwójnej głowicy polerującej
-
Wyposażony wpojedynczy obrótIsamoobrótgłowice polerujące zapewniające elastyczność.
-
Możliwość szybkiej wymiany narzędzi pozwala na pracę w różnych trybach bez długich przestojów.
-
Doskonale nadaje się do przełączania między etapami polerowania zgrubnego i dokładnego.
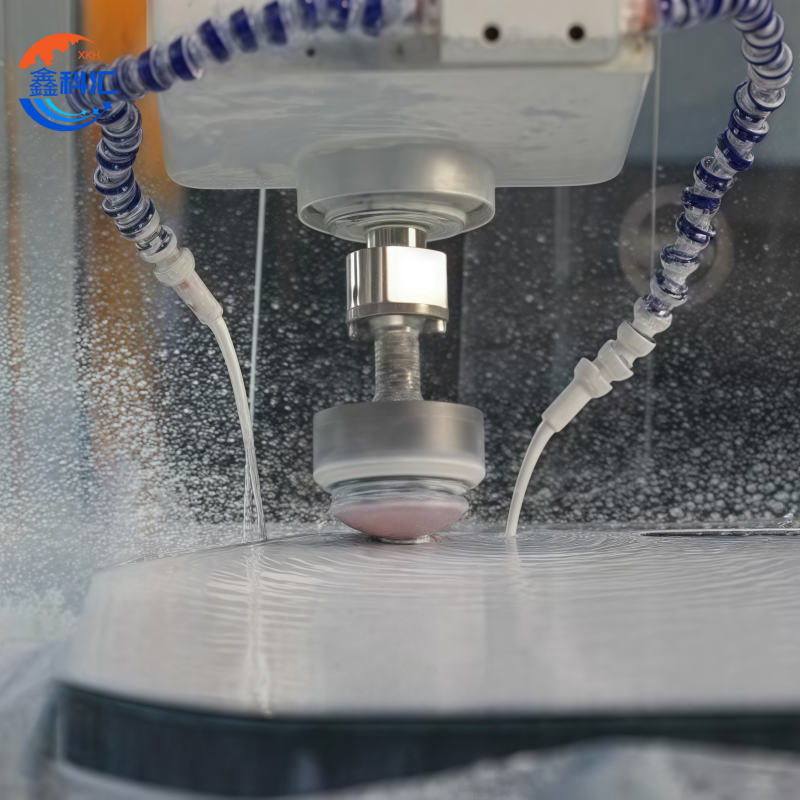
2. Precyzyjny system kontroli siły
-
Monitorowanie w czasie rzeczywistymciśnienie, temperatura i przepływ płynu polerującego.
-
Stałe przyłożenie siły gwarantuje równomierne wykończenie powierzchni całego przedmiotu obrabianego.
-
Posiada zdolność automatycznego dostosowywania się do nierówności powierzchni.
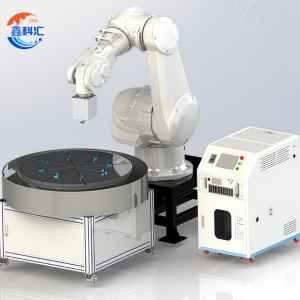
3. Sześcioosiowe sterowanie robotem
-
Pełna swoboda ruchu pozwalająca na pracę nad skomplikowanymi kształtami geometrycznymi.
-
Płynne i dokładne ścieżki ruchu obliczane za pomocą zaawansowanych algorytmów.
-
Wysoka dokładność powtarzania pozycjonowania od ±0,04 mm do ±0,1 mm w zależności od modelu.
4. Inteligentna automatyzacja i pomiary
-
Narzędzia do automatycznej kalibracji umożliwiające precyzyjne ustawienie i wyrównanie.
-
Współrzędnościowy układ pomiarowy umożliwiający dokładne określanie położenia.
-
Fakultatywnymonitorowanie grubości onlinedo kontroli jakości w czasie rzeczywistym.
5. Jakość wykonania klasy przemysłowej
-
Konstrukcja z dwoma serwosilnikami zwiększa wydajność i stabilność polerowania.
-
Sztywna konstrukcja mechaniczna minimalizuje drgania i gwarantuje długotrwałą trwałość.

Dane techniczne robota polerującego
| Model sprzętu | Ciało robota | Powtarzalna dokładność pozycjonowania | Zakres średnic przetwarzania | Głowica polerska jednoobrotowa | Głowica polerska wieloobrotowa | Małe narzędzie | Główny typ koła polerującego | Polerowanie głowicy sferycznej | Zakończ szybką zmianę | Narzędzie do automatycznej kalibracji | Głowica pomiaru współrzędnych | Monitorowanie grubości online | Platforma sterowania numerycznego |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / pełny zakres | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / pełny zakres | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / pełny zakres | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / pełny zakres | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / pełny zakres | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / pełny zakres | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / pełny zakres | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
FAQ – Robot polerujący
1. Jakie rodzaje przedmiotów obrabianych może obrabiać robot polerujący?
Nasza robotyczna maszyna polerująca obsługuje różne kształty i powierzchnie, w tym płaskie, zakrzywione, sferyczne, o dowolnym kształcie i złożone kontury. Nadaje się do polerowania elementów optycznych, precyzyjnych form, powierzchni metalowych i innych zastosowań wymagających wysokiej precyzji.
2. Jaka jest różnica pomiędzy głowicami polerskimi Single Rotation i Multi-Rotation?
-
Głowica polerska jednoobrotowaNarzędzie obraca się wokół jednej osi, co jest idealne do standardowego wykańczania powierzchni i szybkiego usuwania materiału.
-
Głowica polerska wieloobrotowaNarzędzie łączy w sobie rotację z samorotacją (orbitacją), umożliwiając bardziej równomierne polerowanie zakrzywionych i nieregularnych powierzchni.
3. Jaka jest maksymalna średnica obróbki?
W zależności od modelu:
-
Kompaktowe modele (np. IRP500S) obsługująΦ50–Φ500 mm.
-
Modele wielkoskalowe (np. IRP2000AD) obsługują doΦ2000 mm.
O nas
Firma XKH specjalizuje się w rozwoju, produkcji i sprzedaży zaawansowanych technologicznie specjalistycznych szkieł optycznych i nowych materiałów kryształowych. Nasze produkty znajdują zastosowanie w elektronice optycznej, elektronice użytkowej oraz w wojsku. Oferujemy komponenty optyczne z szafiru, obudowy soczewek do telefonów komórkowych, ceramikę, płytki LT, węglik krzemu SIC, kwarc oraz kryształy półprzewodnikowe. Dzięki specjalistycznej wiedzy i najnowocześniejszemu sprzętowi, specjalizujemy się w przetwarzaniu produktów niestandardowych, dążąc do bycia wiodącym przedsiębiorstwem high-tech w branży materiałów optoelektronicznych.

Powiązane produkty
-

2-calowy wafel podłoża SiC 4H-semi HPSI Produkt...
-
Niestandardowe kwadratowe pudełko transportowe, kwadratowe pudełko z oknem...
-

6-calowy podkład HPSI SiC z węglika krzemu ...
-

Korund szafirowy do kryształów Al2O3 z kamieni szlachetnych...
-

Polerowanie podłoża metalowo-aluminiowego monokrystalicznego...
-

Wafel powlekany Au, wafel szafirowy, wafel krzemowy...